Live cameras
To use the HoloCapturerPipeline with live cameras, we must modify the cameraconfig.json file.
Requirements
- A data provider is required. Currently, there are 3 options:
- Kinect camera,
Open Azure Kinect SDK, andAzure Kinect Viewer. - Orbbec camera,
OrbbecSDK, andOrbbecViewer. HoloCalibrationis required for multi-cam usage. For single cam, it is recommended but not necessary.
- Kinect camera,
Integration
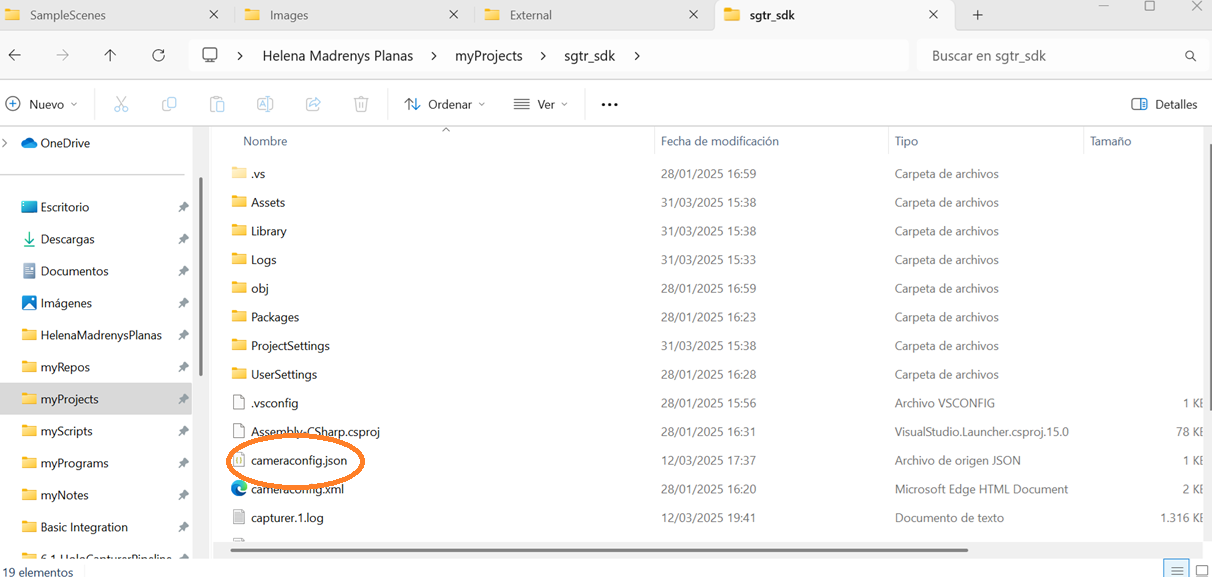
- Open the Unity project in the explorer and open the file cameraconfig.json.
- There are 2 main parameters to be aware of:
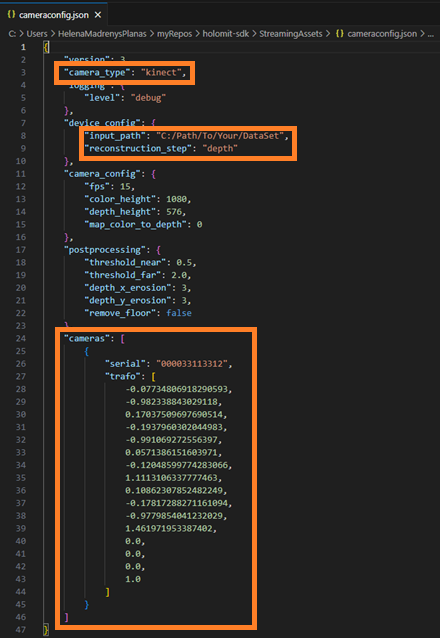
camera_type: the type of camera input you want to use.cameras: the section where the cameras in use are defined and their transformation matrices.
-
Change the
camera_typeto the type of camera you want to use. The ones available arekinectororbbec. -
Change the
camerassection according to the cameras you have in use. It includes:serial: the serial number of the camera in use.trafo: the transformation matrix of said camera. For single cam usage, the identity matrix will suffice. For multi-cam, please useHoloCalibration.
Configuration parameters
Consult cameraconfig.json documentation for all configuration parameters available.
Use cases and good practices
Camera serial number
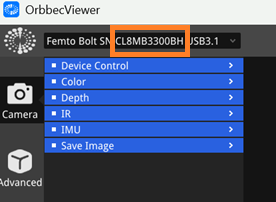
To ensure that the serial number of the cams is correct, consult its pertinent viewer. In the following image, you can observe that the Orbbec camera in use has a serial number of CL8MB3300BH.
Alternatively, run the app with an incorrect serial and consult the capturer.log, where the connected cameras serial numbers will appear.
